Submitted by 熊茂祥 on 2015, May 7, 12:30 PM
ROS脚本(无需修改任何内容,自适应兼容。建议30秒以上运行一次)
- :global sjc 0
- :global adslnumjc 0
- :global oldadjc
- :foreach pallc in=[/int pppoe-client find disabled=no] do={
- :set adslnumjc ($adslnumjc+1)
- :foreach ujc in=([/int pppoe-client get $pallc running]=yes) do={
- :if ($ujc=true) do={
- :set sjc (sjc+1)}}}
- :if ((!($oldadjc = $sjc)) = true) do={
- :log warning ("当前" . $sjc . "/" . $adslnumjc . "条拨号线路工作正常。")
- }
不会用自己面壁,无需多说...
» 阅读全文
Tags: ros, 脚本, pppoe, 拨号, 日志
ROS | 评论:0
| 阅读:31509
Submitted by 熊茂祥 on 2015, May 3, 1:38 PM
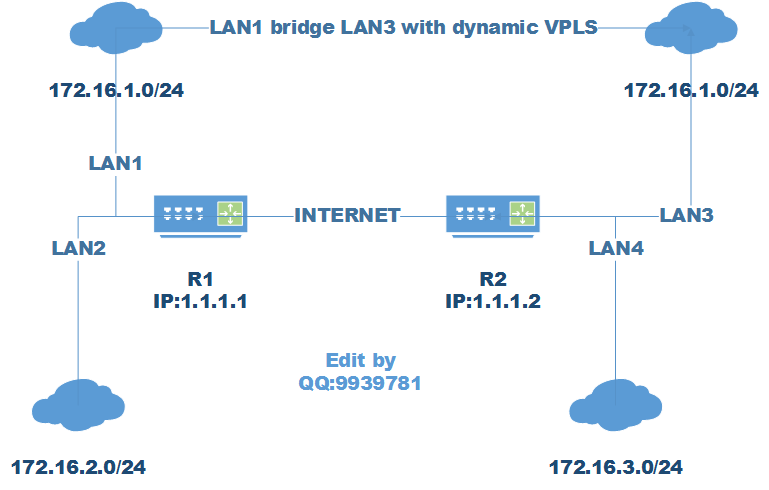
假设某总公司R1的LAN1需要和分公司R2的LAN3进行L2桥接,并且LAN1和LAN3在同一个网段,要求LAN1和LAN3里的终端机器可以互相访问,支持MAC通讯,支持IPX通讯。(当然前提是LAN1和LAN3里的终端和终端之间IP不能冲突。)如果ISP禁止R1和R2之间进行BGP通讯需要先嵌套一个加密隧道,PPTP,L2TP,SSTP...等等都行。
» 阅读全文
Tags: ros, vpls, bgp, 桥接, bridge
ROS | 评论:3
| 阅读:33343
Submitted by 熊茂祥 on 2015, February 13, 1:25 PM
ROS脚本代码
- #定义温度报警阀值比如30度
- :local tempbeep 30
- #定义电压报警阀值比如23.2V
- :local volbeep 232
- :if (([/system health get temperature]>$tempbeep) || ([/system health get voltage]>$volbeep)) do={
- :beep length=200ms frequency=3000
- :delay 200ms
- :beep length=200ms frequency=3500
- :delay 200ms
- :beep length=200ms frequency=3000
- :delay 200ms
- :beep length=200ms frequency=3500
- :delay 200ms
- :beep length=200ms frequency=3000
- :delay 200ms
- }
首先你的RB设备必须具备温度传感器和电压传感器,否则请不要使用。
» 阅读全文
Tags: ros, 温度, 电压, 报警, 监测
ROS | 评论:0
| 阅读:24879
Submitted by 熊茂祥 on 2014, October 8, 12:23 PM
本策略适用于防范UDP流量攻击(比如阿拉丁UDP攻击器)。TCP连接数攻击限制下单机连接数就行了,我就不多说了。
首先要新建一个网桥,将自己内网卡加入到桥接。
ROS防火墙脚本
- /interface bridge settings set use-ip-firewall=yes
- /ip firewall filter add action=add-src-to-address-list address-list=att address-list-timeout=10m chain=input connection-rate=10M-4294967295 protocol=udp src-address=192.168.0.0/24
- /ip firewall mangle add action=add-src-to-address-list address-list=att address-list-timeout=10m chain=postrouting connection-rate=10M-4294967295 protocol=udp src-address=192.168.0.0/24
修改IP为自己的内网IP地址范围。
ROS计划任务脚本
- :global attip
- :global defint
- :global taa 0
- :global nowmonth
- :global allmonth jan,feb,mar,apr,may,jun,jul,aug,sep,oct,nov,dec
- :foreach lizi in=[$allmonth] do={
- :if ([:pick [/system clock get date] 0 3]=$lizi) do={
- :set nowmonth ($taa+1)}
- :set taa ($taa + 1)}
- :global atttime ([:pick [/system clock get date] 7 11].$nowmonth.[:pick [/system clock get date] 4 6]."-".[/system clock get time]);
- :foreach fatt in=[/ip firewall address-list find list=att] do={
- :set attip [/ip firewall address-list get $fatt address]
- :if ([/interface bridge nat find arp-dst-address=($attip."/32")]="") do={
- /interface bridge nat add action=src-nat arp-dst-address=($attip."/32") chain=srcnat mac-protocol=arp comment=("att-".$atttime)}}
- :foreach fattd in=[/interface bridge nat find] do={
- :if ([/ip firewall address-list find list=att address=[:pick [/interface bridge nat get $fattd arp-dst-address] 0 ([:len [/interface bridge nat get $fattd arp-dst-address]]-3)]]="") do={
- /interface bridge nat remove $fattd}}
设置为定时循环执行,建议间隔时间为3-5秒左右为宜。
本策略原理是将攻击者的IP记录下来,加入攻击者的IP到桥防火墙,攻击者的IP将在ARP缓存超时后(WIN7系统5次测试计算后得到平均值为20秒左右。)无法和ROS通讯,因为找不到ROS的MAC,包括流量攻击也打不上来,因为找不到目标。(进入桥防火墙后即使攻击者再手工绑定路由MAC也无法成功。)
缺点:若客户机在攻击前已绑定路由MAC,则防御无法生效。因为ARP缓存不会超时。
» 阅读全文
Tags: ros, 内网, 攻击, udp, 流量
ROS | 评论:2
| 阅读:38561
Submitted by 熊茂祥 on 2014, September 25, 11:56 PM
方便自己,方便大家,附上一个ROS的NTP对时脚本。
ROS脚本
- /system ntp client set enabled=yes primary-ntp=123.57.72.35
- /system clock set time-zone-name=Asia/Shanghai
» 阅读全文
Tags: ntp, ros, 时间, 同步, 对时
ROS | 评论:3
| 阅读:48390




